


Section: Software
AROSDYN
Participants : Igor Paromtchik, Mathias Perrollaz, Alexandros Makris, Amaury Nègre, Christian Laugier.
ArosDyn (http://arosdyn.gforge.inria.fr/ ) is a system which integrates our recently developped techniques to provide a real-time collision risk estimation in a dynamic environment. The main features of this software are:
-
The deliberated design provides high maintainability, scalability and reuseness of the models and algorithms.
-
The software has a user interface (UI) which is user-friendly.
-
The software facilitates the parameter tuning of the models.
-
It uses the GPU to accelerate the computation.
-
Working together with the Hugr middleware (http://gforge.inria.fr/projects/cycabtk ), it can run on our experimental vehicle in real-time.
The software is developed in C/C++ in Linux and its architecture is shown in Fig.2 .
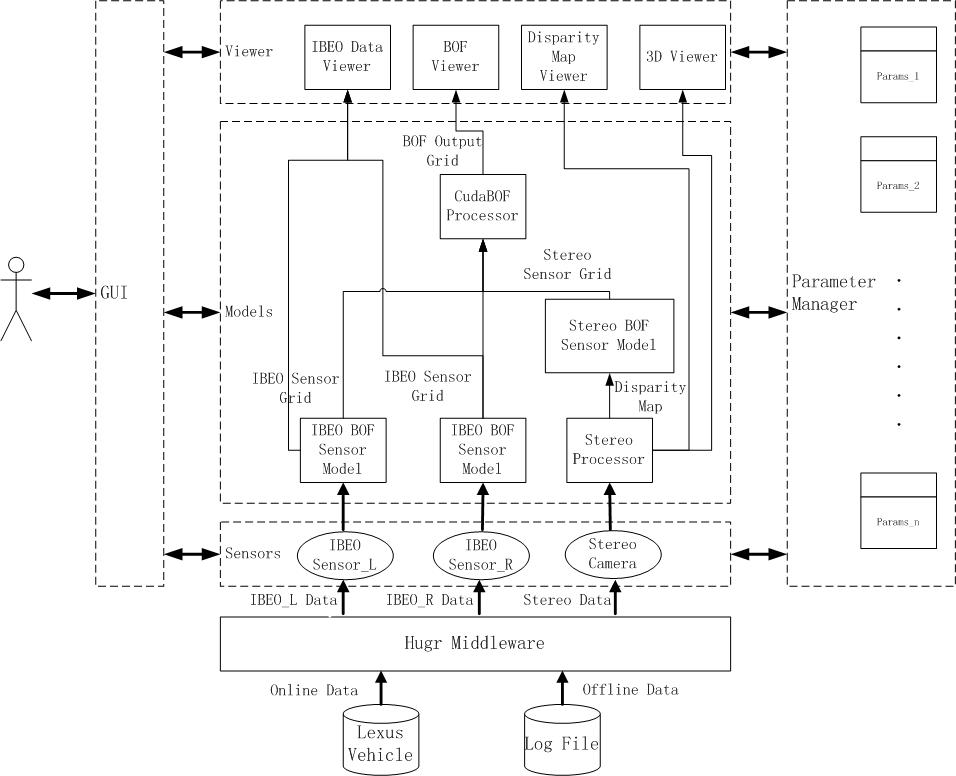
In this example, we demonstrate a typical sensor fusion application. We retrieve the raw data from the Hugr middleware and store them in individual sensor objects. Then, by using this framework, we integrate the IBEO Bayesian Occupancy Filter (BOF) sensor model, the stereo sensor processor model, the stereo BOF sensor model and the BOF model together. Finally, different aspects of the computational results are visualized in several viewers. At the same time, all the parameters used by the algorithms can be tuned online.
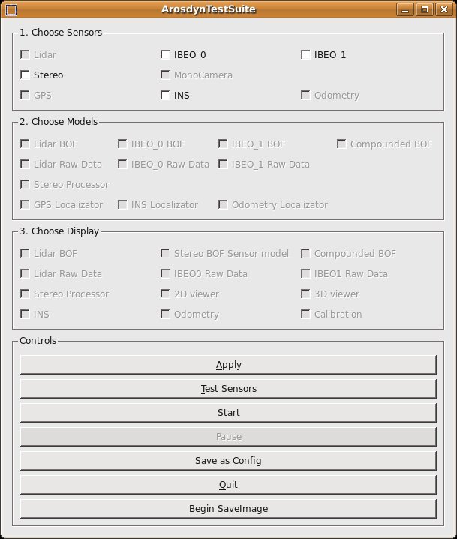
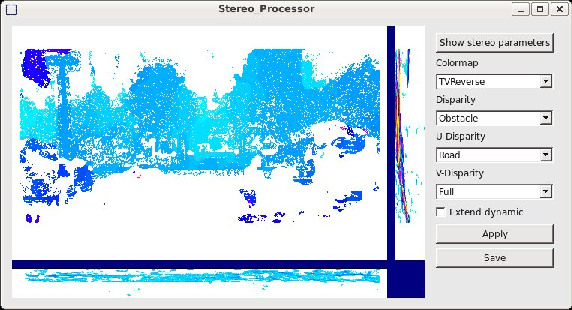
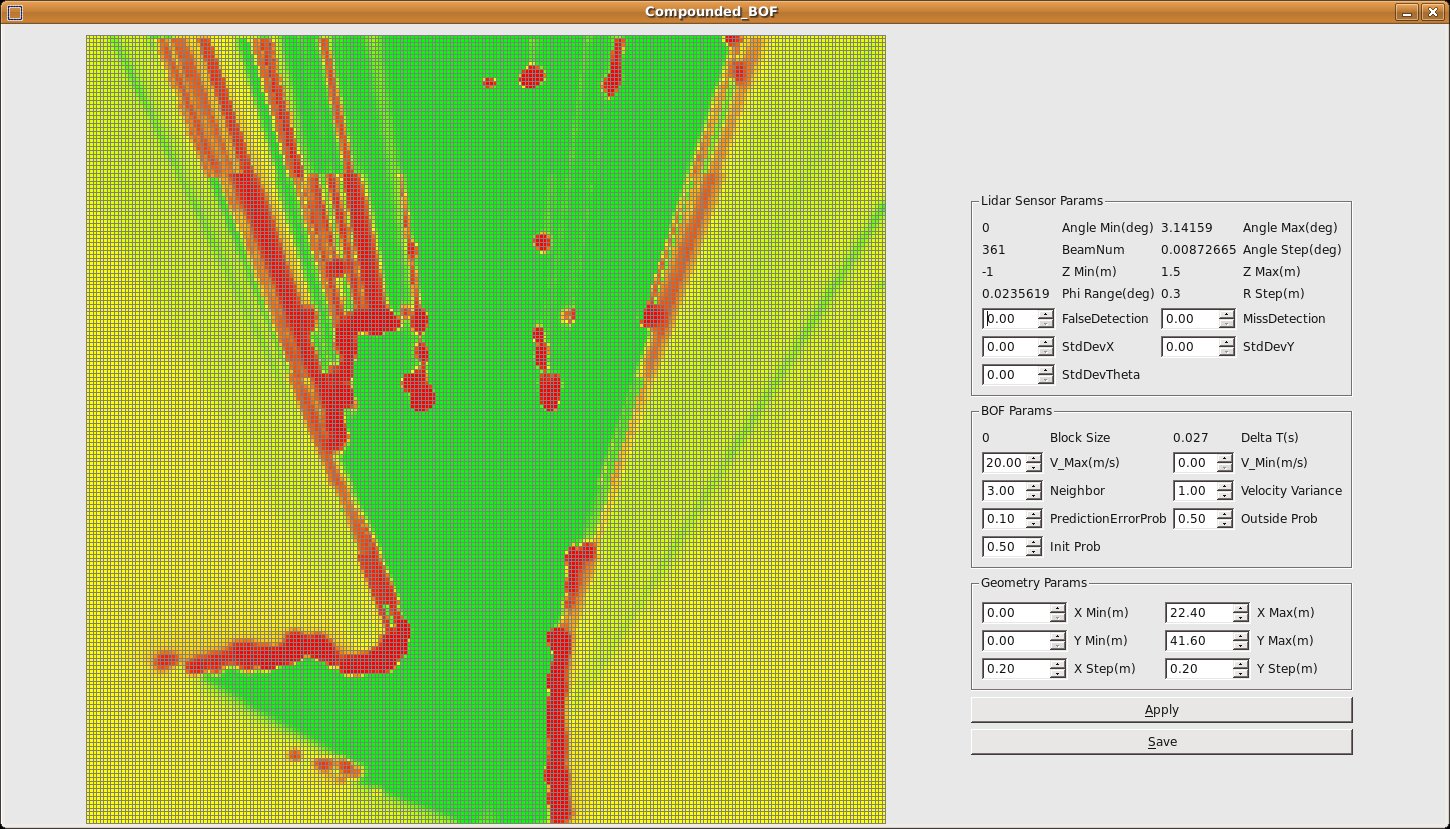
Several windows of this application are shown in Fig. 3 . Here we demonstrate the main window, the 2D viewer of the stereo camera and the lidar, the disparity map of the stereo vision and the compounded BOF grid which is the result of the sensor fusion.

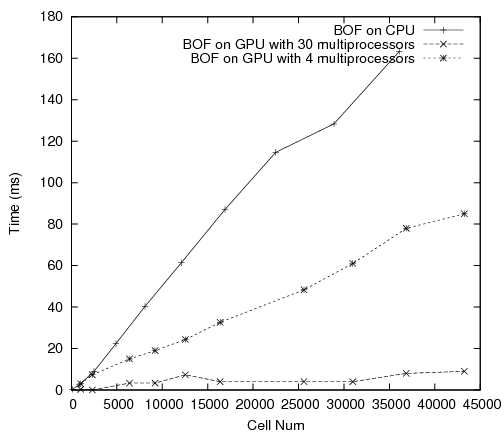
Another important property of this software is a large part of the computation task executed on GPU. As the processing of stereo image and the computaion in the BOF can be highly parallelized, we run these tasks on the GPU to improve the time performance, as shown in Fig. 4 . In this way, the software can work in real-time.
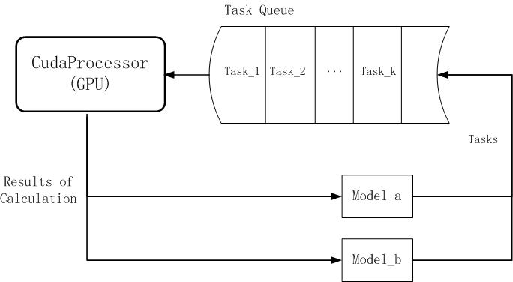
The GPU calculation is based on CUDA library and is carried out in an independent thread. The schematic graph of the GPU computaional thread is shown in Fig. 5 .
Furthermore, thanks to the deliberated design of the software, we can easily add new models to it and let them work together. The fast detection and tracking algorithm (FCTA) and the Gaussian process based collision assessment algorithm are added into this framework.